Cooperative sensor communications is a cutting-edge signal processing research field where interconnected sensors have the willingness to share data and resources among each other. Cooperative communication is viewed as a network solution if multiple co-located sensors cooperate in order to achieve comparable or higher gains with regards to the non-cooperative signal processing scheme. Algorithms involving the exchange of information among a collection of sensors that are connected together has advanced tremendously and brought about many breakthroughs in signal processing research. A vast application space for cooperative strategies in sensor networks exist.
In the sequel, we give an overview of our recent research projects in the area of cooperative communication and networking.
Projects
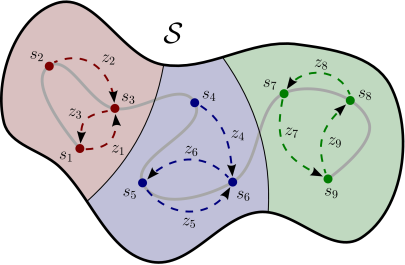
There arises the need in many network applications to infer and track different models of interest in an environment where agents do not know beforehand which models are being observed by their neighbors.
There are many applications in practice where agents can be subjected to data from different sources as, for example, in tracking multiple targets or swarming towards different food sources.
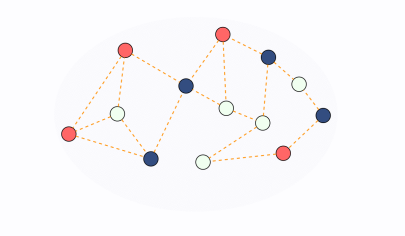
In our research, we propose an adaptive and distributed clustering technique that allows agents to learn and form their clusters in a robust manner from streaming data. Once clusters are formed, cooperation among agents with similar objectives can increase the performance of the inference task. Based on the cluster formation, the unused links among the agents that track different models are exploited to link the agents that are interested in the same model but do not have direct links between each other. The connectivity of the agents is described by a graph.
For more information, please contact Abdelhak Zoubir.
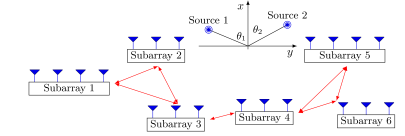
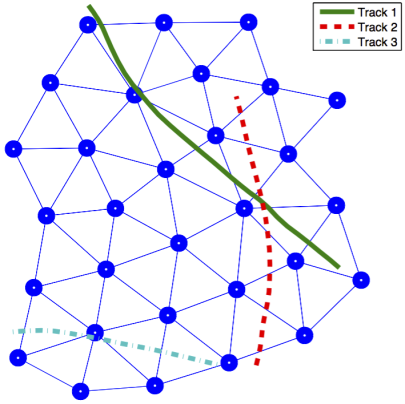
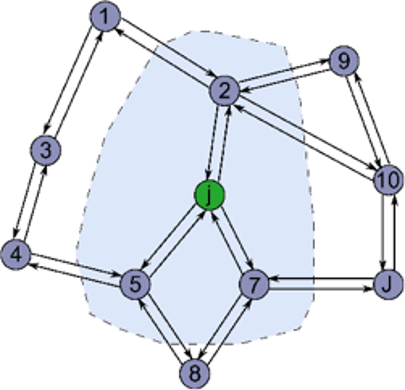
In this project, we consider direction-of-arrival (DOA) estimation in wireless sensor networks (WSN), where each node in the network comprises of multiple sensors. The sensors in each node, also referred to as subarray, are considered to be fully calibrated, whereas the displacement between the subarrays are considered to be unknown, thus the whole network is referred to as a partly calibrated array of sensors.
In this project, we aim at designing decentralized DOA estimation algorithms with the following properties:
- The number of identifiable DOAs using the whole array is larger than the number identifiable by each subarray individually.
- Fully decentralized, i.e, only local communication between neighboring subarrays are used.
In the Figure, a network of 6 subarrays is shown. The red lines indicate communication links between the subarrays. The geometry of the demonstrated array allows search-free DOA estimation, using algorithms such as ESPRIT. The local communication links between the subarrays lead to a fully decentralized DOA estimation with low communication cost.
The project is organized in cooperation with the Communication Systems Group. For more information please contact Abdelhak Zoubir.
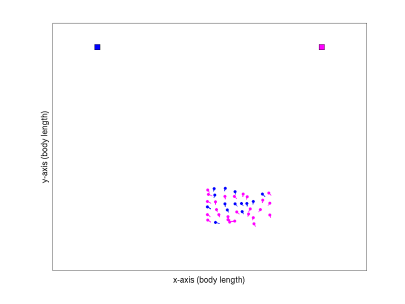
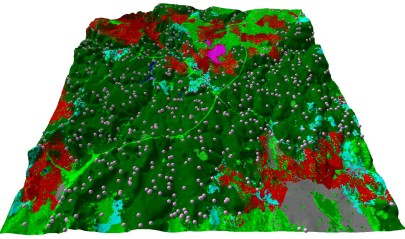
A lot of communication and wireless network applications are inspired by the collective behaviour of some animal groups, e.g., bird flocking, fish schooling, and animal herding.
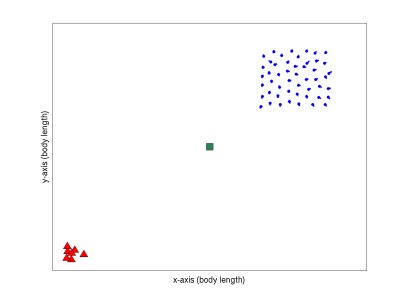
Swarming is a global behaviour made up of a large number of homogeneous, simple nodes interacting locally with each other and with the environment without any central control. In the simulated swarming networks, nodes move towards the target coherently and harmonically to do some tasks in a distribution manner, where each node has access to local information and share some data with its neighbors. The motion mechanism of the nodes depends on several factors, moving towards the target, avoiding collision among the nodes, and escaping from predators.
In some cases it might exist two food sources (two models), but each node does not know beforehand which model it observes, therefore, the objective of the network firstly is to reach agreement on one model then do the estimation and tracking tasks. In other words the nodes need to decide between these two options.
In this work, we are interested in enhancing the decision-making task of reaching an agreement over the nodes, extend the algorithm to the case when there are multiple food sources and improve the herding behaviour if there are predators attack the nodes.
For more information, please contact Abdelhak Zoubir.
Most speech processing systems including heterogeneous and distributed voice services as well as hearing aids suffer from environmental noise. Despite the wealth of speech processing research in the past few decades, technical obstacles still prevent the use of these systems in modern applications.
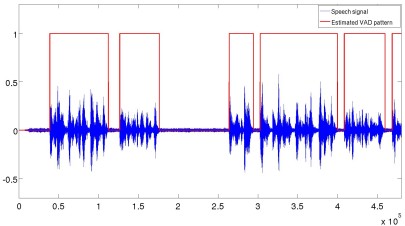
Voice Activity Detection (VAD) is a common function in speech processing that aims at distinguishing noise-only sequences from segments of significant speech embedded in noise. Different approaches to VAD can be found in the literature, e.g. based on spectrum analysis or higher-order statistics.
Multi-speaker VAD in a distributed wireless sensor network remains an unresolved issue affecting numerous applications. For instance, classifying multiple far-field wideband audio signals into speech and non-speech segments is an essential pre-processing step for speech enhancement applications.
The focus of our research lies on developing signal processing algorithms for distributed multi-speech detection in noise, particularly, algorithms for language-independent VAD. To this end, we exploit characteristics of speech produced in noise to extract reliable feature vectors. Our research is part of the EU project Heterogeneous Ad-Hoc Networks for Distributed, Cooperative, and Adaptive Multimedia Signal Processing (HANDiCAMS). The objective of HANDiCAMS is to develop new distributed, cooperative, and adaptive signal processing algorithms that operate under the novel Multiple Devices for Multiple Tasks (MDMT) paradigm.
For more information, please contact Abdelhak Zoubir.
The problem of tracking multiple targets at once is becoming increasingly important in many defense and civilian applications such as air and ground traffic control, harbor surveillance, maritime traffic control, or video communication and surveillance. Distributed sensor networks offer a desirable platform for multi-target tracking applications due to their low cost and ease of deployment, their lack of a single point of failure, as well as their inherent redundancy and fault-tolerance.
We investigate distributed multi-target tracking in networks that are autonomous in the sense that the sensor nodes communicate with their neighbors in order to collaboratively detect and track targets in the region of interest. In addition, all of the sensors are equipped with a signal processing unit, allowing them to form decisions without a fusion center, i.e., a central processing and decision unit. That way, the network can autonomously react to events such as the detection of an intruder without relying on a network operator. mobile sensor nodes would enable reactions such as target pursuit or escape.
For more information, contact Abdelhak Zoubir.
Emergence and the ability of self-organization are fascinating characteristics of natural systems with interacting agents. Without a central controller, these systems are inherently robust to failure while, at the same time, they show remarkable large-scale dynamics that allow for fast adaptation to changing environments. Interestingly, for large system sizes, it is usually not the complexity of the individual agents but their (local) coupling that predominantly gears the final system dynamics. It has been shown, in fact, that even relatively simple local dynamics can result in various kinds of higher-order complexity at a global scale when coupled through a network with many agents.
In this project, we consider large-scale swarm dynamics from a decision-theoretic perspective and try to understand how a global system behavior emerges from the agent-level. In particular, we investigate how a given macroscopic system behavior can be realized in terms of purely local interactions and how to design a swarm of locally interacting agents such that they pursue a common global goal.
The project is organized in cooperation with the Bioinspired Communication Systems Lab. For more information, contact Abdelhak Zoubir.
Learning optimal behavior can be a challenging task, especially if we deal with complex or interacting systems whose state space is large. Yet, in many situations, we can observe large-scale systems demonstrating specialized behavior that is highly optimized for certain problems. For example, nature has come up with a whole variety of different collective strategies, each of which has been optimized through the process of natural selection. Hence, an interesting question is whether one can facilitate the learning process by borrowing concepts from nature.
In this project, we ask the question how to reverse-engineer those systems from observed optimal system dynamics. More specifically, we consider the problem of learning optimal controllers from demonstrated behavior by building decision-theoretic models using tools from modern machine learning and Bayesian inference.
The project is organized in cooperation with the Bioinspired Communication Systems Lab. For more information, contact Abdelhak Zoubir.
Statistical Process Control (SPC) methods such as control charts are widely used as a means of monitoring data streams to detect changes in the underlying process that may arise at unknown times. However, difficulties arise in real-world applications since well-established procedures tend to be parametric and based on simple models. In particular, the assumption of independent observations – despite its popularity – often turns out to be incorrect.
This research project deals with the application and development of nonparametric change detection algorithms for time series. The current focus is on Singular Spectrum Analysis (SSA) and related methods.
For more information, contact Abdelhak Zoubir.
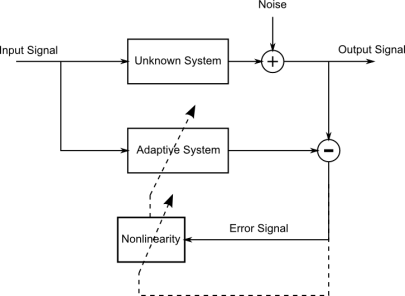
Diffusion networks tasked with solving inference problems have attracted attention in recent years due to their reliability, scalability, resource efficiency, and resilience to node and link failure. In diffusion networks, nodes run adaptive algorithms on data exchanged within their neighborhoods in order to estimate or detect parameters of interest. Distributed cooperative adaptation enables the network to learn and track changes in the environment on-the-fly. However, often the measurements at the nodes are corrupted by non-Gaussian, possibly impulsive noise. State-of-the-art adaptive algorithms based on the linear least-mean-squares error criterion exhibit sub-optimal transient and steady-state performance when the noise distribution departs from Gaussianity, leading to unreliable estimates or decisions.
In this project, we tackle the problem by developing robust adaptive algorithms that employ error nonlinearities that adapt to the noise distribution in run-time. The resulting robust diffusion estimation and detection algorithms are analyzed in the mean and the mean-square sense using the energy conservation framework.
For more information, please contact Abdelhak Zoubir.
Distributed adaptive signal processing and communication networking are rapidly advancing research areas which enable new and powerful signal processing tasks, e.g., distributed speech enhancement in adverse environments. Today’s wireless sensor networks provide the possibility to monitor physical environments via small low-cost wireless devices. Given the large amount of sensed data, efficient and robust clustering and classification becomes a critical task in many applications. Typically, the devices must operate under stringent power and communication constraints and the transmission of observations to a fusion center is, in many cases, unfeasible or undesired. Furthermore, data recorded by wireless sensor networks may be affected by noise and errors.
A challenging research question in such cases is the design of data clustering and classification rules when each sensor collects a set of unlabeled observations. By communicating with each other, the network of sensors achieves improved clustering and classification results compared to single node processing, while being insensitive to a certain amount of outliers or erroneous data.
For more information on this research project, contact Abdelhak Zoubir.
Detecting the presence or absence of a phenomenon or the change of a state is a fundamental problem in various fields of engineering. Whether the objective is to detect an intruder in a region under surveillance, the outbreak of a forest fire or abnormalities in the heart-rate readings of a patient, the crucial task is to obtain an accurate and timely decision.
In sequential detection, i.e. sequential hypothesis testing, the detector stops querying the environment once it has obtained enough information to confidently decide for one of the hypotheses. Compared to standard, non-sequential detection, where the detector operates on a batch of measurements, the decision delay can approximately be cut in half.
We investigate distributed sequential detection in wireless sensor networks, which, due to their low cost and ease of deployment, their lack of a single point of failure, as well as their inherent redundancy and fault-tolerance, provide an attractive platform for detection problems. Here, each sensor node in the network is equipped with processing and communication capabilities so that the hypothesis test can be performed locally and information can be exchanged with neighboring nodes, enabling collaborative detection schemes.
Finally, we seek robust rather than optimal detection schemes, which perform reasonably well even if reality deviates from the made assumptions to model the detection problem at hand.
For more information, contact Abdelhak Zoubir
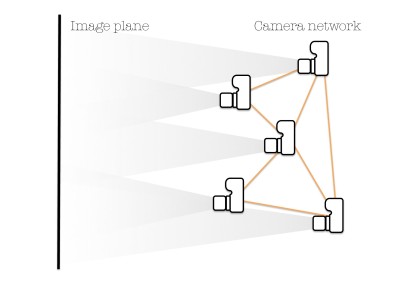
Current ICT paradigms consider either stand-alone devices that focus on individual tasks or multiple devices that perform a single joint task, as it is typically assumed in classical Wireless Sensor Networks (WSN). Recent research on signal processing for distributed sensor networks has introduced a new ICT paradigm, which considers Multiple Devices that cooperate on Multiple Tasks (MDMT). This is different from current ICT paradigms, because it considers multiple devices, such as smart phones, handheld cameras or hearing aids, that cooperate to solve multiple signal processing tasks. Among the many devices considered on the MDMT paradigm, we focus on camera networks.
In the MDMT paradigm, cooperation among the cameras can still be beneficial if subsets of the cameras share common interest or observations. For a successful communication between the cameras, it is important for each of the cameras to know: “who observes what?”. Answering this question serves as a preliminary step for a successful cooperation in a distributed camera network setting. Since the camera networks that we consider are fully distributed, in the sense that there is no fusion center that collects all the information, the cameras communicate only within some neighborhood. Thus, when a camera wants to cooperate with its neighbors, it is necessary to establish a labelling scheme that assigns a unique label to every object of interest. Only in this way, a camera can make sure that the information it receives from its neighbors refers to its object of interest. In distributed camera networks, unique labelling of objects leads to the formation of interest specific clusters and this plays a big role in reducing the communication cost.
The research question that we address is to develop object labelling algorithms for distributed camera networks. In a camera network setting where outliers can be commonly encountered, the use of robust techniques for the object labelling task is very important.
For more information, contact Abdelhak Zoubir.