Introduction
Whilst a few decades ago cars were viewed as purely mechanical devices, today's new models contain increasingly sophisticated electrical devices. As this trend continues, there will be more and more signal processing going into the development of the vehicles of tomorrow.
Advanced signal processing techniques are already being used in several areas of the automotive industry, including, but not limited to:
- Engine control and monitoring – e.g. detection of knock
- Parking assistance/Autonomous navigation – sensors and systems to create environmental awareness and to assist the driver in entering a parking place
- Modern driver assistance systems – radar sensors measure the environment and allow applications such as adaptive cruise control or lane change assistant
- Active safety – systems that detect dangerous situations and can alert the driver to potential dangers and/or induce
- procedures to avoid or alleviate the crash
Related project: Acoustic imaging for safety and comfort applications
DOA Estimation for Automotive Radar
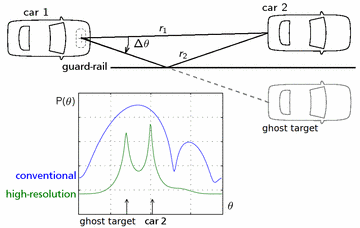
A radar array system can be used to determine the range, relative velocity and direction-of-arrival (DOA) of objects in a car environment. These measurements are required by modern driver assistance systems such as adaptive cruise control (ACC) or lane-change assistant (LCA).
We focus on the DOA estimation problem by means of phase differences, which are received at the array elements. In the mentioned applications, there are some special scenarios where conventional DOA estimation fails to resolve closely spaced targets and high-resolution methods become necessary. Often this corresponds to the occurance of specular multipath with the guard-rail.
High-resolution methods are generally computationally more demanding and thus may not be straightforwardly applicable for a system with real-time constraints. Clever selection strategies and computational simplifications are subject of current research.
Introductory Literature
- H. Winner, S. Hakuli, G. Wolf, Handbuch Fahrerassistenzsysteme – Grundlagen, Komponenten und Systeme für aktive Sicherheit und Komfort, Vieweg+Teubner 2009
- T. Tuncer, B. Friedlander, Classical and Modern Direction-of-Arrival Estimation, Academic Press 2009.
Selected SPG Publications
- P. Heidenreich, D. Stenmanns, A. Zoubir, Computationally Simple Criteria for Detecting a Multi-Target Scenario in Automotive Radar Array Processing, EUSIPCO 2010.
- M. Moebus, M. Viberg and A. Zoubir, Parametrization of Acoustic Images for the Detection of Human Presence by Mobile Platforms, ICASSP 2010.
- P. Heidenreich, A. Zoubir, High-Resolution Direction Finding of Coherent Sources in the Presence of Model Errors using Alternating Projections, SSP Workshop 2009.
- M. Moebus and A. Zoubir, Three-Dimensional Ultra-Sound Imaging In Air For Parking And Pedestrian Protection, bookchapter in “Vehicle Corpus and Signal Processing for Driver Behavior”, Springer 2008.
Contact: For more information on this research project contact Prof. Abdelhak M. Zoubir.
