Problem Description
In this project, the use of sensor arrays is investigated for 3D acoustic imaging applications such as autonomous navigation (e.g. robots) and safety applications (e.g. obstacle detection and classification for collision avoidance).
The aim is to advance the rather simple approaches of existing sensors, e.g. simple range measurements, to create environmental awareness of mobile platforms such as a robot independent of lighting conditions and expensive hardware.
Why acoustic imaging?
While acoustic arrays have been successfully used for imaging in medical, material or underwater sonar applications, their use in air is still limited due to physical restrictions, i.e. slow speed of propagation and high attenuation.
However, for short-range applications such as autonomous navigation robots, they offer a cheap, reliable and low power alternative to optical or lidar/radar sensors while providing discrimination between close objects and background (in contrast to optical sensors). In this context, acoustic imaging can be viewed as a valuable sensor modality that may extend the capabilities of a system with relatively small effort.
Additionally, acoustic imaging allows to detect the presence of persons in the environment based on relatively simple features from the acoustic images. To a limited extend, it is even possible to classify the posture of the human, e.g., whether he or she is standing or walking, already from single images.
Approach
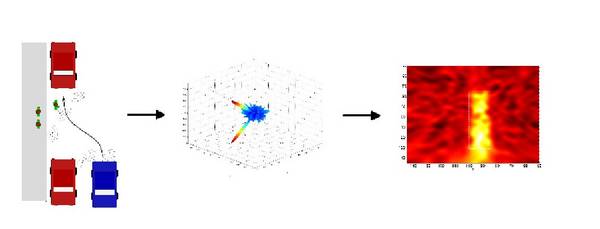
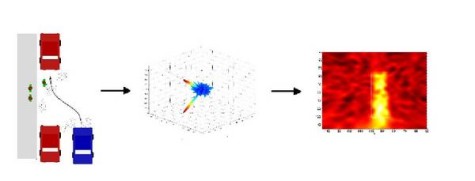
The primary goal is to obtain a three-dimensional map of the scene that surrounds the platform. To achieve this, the following aspects are subject to research:
- the development of fast algorithms to obtain high-quality images, allowing for multiple, spatially extended, highly correlated sources
- optimization of the sensor array layout with respect to the no. of elements, noise suppression and resolution of object contours
- detection and classification of objects, their position, surface structure and (possibly) shape
